When walking in a crowded place, chances are you aren’t thinking about how to avoid bumping into the person next to you. Our bodies and minds are designed to apply numerous complex skills that, when combined, allow us to execute seemingly simple motions and keep our bodies upright and under control. Now, thanks to Luis Sentis and the amazing work happening in his Human Centered Robotics Laboratory, the same type of balance and “natural” control may soon be experienced by robots.
Sentis, an associate professor in the Department of Aerospace Engineering and Engineering Mechanics, has demonstrated a novel approach to human-like balance in biped robots that can be used in everything from emergency response to defense to entertainment. By translating a key human physical dynamic skill — maintaining whole-body balance — into a mathematical equation, the team was able to use the numerical formula to program their robot Mercury. Because Mercury doesn’t have jointed feet, the researchers looked at hiking for the most appropriate comparison. They calculated the margin of error necessary for a hiker to lose one’s balance and fall when hillwalking to be a simple figure — 2 centimeters.
“Essentially, we developed a technique to teach autonomous robots how to maintain balance even when they are hit unexpectedly or when a force is applied without warning,” Sentis said. “This is a valuable skill we as humans use when navigating through large crowds.”
Human-body-like movement is far harder to achieve for a robot without ankle control than for one equipped with actuated, or jointed, feet. But once mastered, it’s also the reason why Mercury could become a proficient hiker. To do so, the UT Austin team used an efficient whole-body controller developed by integrating contact-consistent rotators (or torques) that can effectively send and receive data to essentially tell the robot what move to make next in response to a collision. They also applied a mathematical technique — often used in 3D animation to achieve realistic-looking movements from animated characters — known as inverse kinematics, along with low-level motor position controllers.
Like all the robots developed in Sentis’ lab, the biped is anthropomorphic — designed to mimic the movement and characteristics of humans.
“We choose to mimic human movement and physical form in our lab because I believe autonomous systems designed to be similar to humans gives the technology greater familiarity,” Sentis said. “This, in turn, will make us more comfortable with robotic behavior, and the more we can relate, the easier it will be to recognize just how much potential autonomous systems have to enhance our lives.”
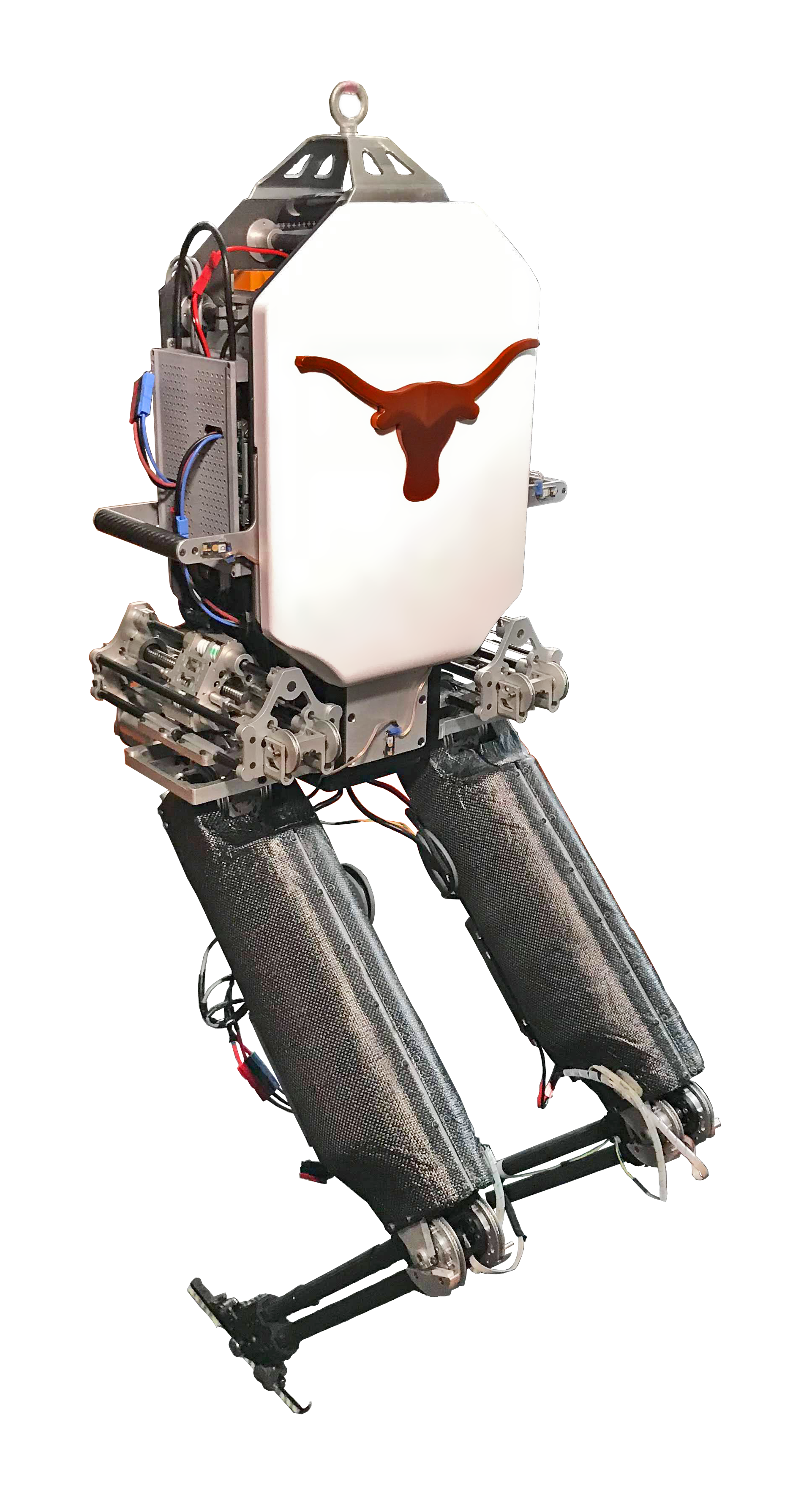
ABOUT MERCURY
Height: 4’6”
Weight: 35 lbs.
Age: 6 years (from initial concept to now)
Cost: $650,000 (Total spent on research, design and development to date)
What’s Inside: 1 CPU, 1 tactical inertial measurement unit, 6 series elastic actuators, 6 motor amplifiers, 7 microcontrollers
Student Involvement: 4 Cockrell School students helped build it
![]()